Aktive Lokalisierung – Passive Lokalisierung
Grundlegendes zu Lokalisierungssystemen
Die Kenntnis über die Position einer Person oder eines Objekts in Innen- und Außenbereichen gewinnen für viele Anwendungen in industriellen und sozialen Bereichen zunehmend an Bedeutung. Sei es zur Qualitätssicherung, Steigerung der Effizienz, Betriebssicherheit, Schutz vor Diebstahl oder schneller Hilfe im Notfall.
So breit wie die Anwendungsmöglichkeiten für Standortbestimmungs- oder Lokalisierungssysteme sind auch die zur Verfügung stehenden technischen Systeme gefächert. Hier werden nur Indoor-Lokalisierungssysteme (Englisch: Indoor Positioning Systems, IPS) betrachtet.
Anforderungen an Indoor-Lokalisierungssysteme
Die erste Frage ist, welche Information genau benötigt wird. Typischerweise handelt es sich um eine Auswahl oder Kombination aus folgenden Informationen:
- Ort in der horizontalen Ebene (x-y-Position),
- Ort in der vertikalen Ebene (z-Position),
- Ausrichtung in der horizontalen Ebene (Blickwinkel),
- Identität der Person oder des Objekts,
- Zeitpunkt der Ortsbestimmung.
Werden Ort und Identität in Verbindung ermittelt, spricht man von Standortverfolgungssystemen (Tracker). Die Identität kann dabei auch eine anonyme Zufallsfolge sein, die nur zur Unterscheidung dient und zeitlich begrenzt gültig ist.
Hinzu kommen Anwendungsanforderungen an das IPS:
- erforderliche Genauigkeit der Lokalisierung,
- zeitliche Auflösung,
- Robustheit gegenüber Störungen und Fremdeinflüssen,
- Reichweite,
- Größe der Knoten und des Systems,
- usw.
sowie die betriebsbedingten Anforderungen:
- Einfluss auf die Privatsphäre von georteten Personen,
- Betriebssicherheit und Gesundheitsschutz,
- Datenschutz und ethische Aspekte des Betriebs,
- Umwelteinflüsse,
- Skalierbarkeit,
- Bedienbarkeit,
- Installations- und Betriebskosten,
- usw.
Welche Anforderungen an ein Lokalisierungssystem im Detail wichtig sind, sind für jede Anwendung und für jedes System einzeln festzulegen.
Kategorien von Lokalisierungssystemen
Es gibt viele Ansätze, um Systeme und Technologien zur Lokalisierung zu unterscheiden und zu kategorisieren. Eine Möglichkeit der Unterscheidung bildet die Art der Mitwirkung des zu ortenden Objekts oder der zu ortenden Person [1], eine zweite ist die Art der Energieversorgung (lokale Energiequelle oder Fernspeisung [2]), eine dritte folgt dem Teilsystem, das die Position berechnet (z. B. mobile Knoten oder fixe Ankerknoten [3]). Gemäß der ersten Variante werden Lokalisierungssysteme in zwei Kategorien eingeteilt:
- Aktive Systeme, die an der Person oder am Objekt angebracht sind und Signale verwenden, um den Standort einzuschätzen, und
- Passive Systeme, welche die Veränderung der Umgebung messen und daraus den Standort schätzen.
In der Abbildung sind die beiden Klassen dargestellt, die auch als aktive und passive Verfolgungssysteme bezeichnet werden:
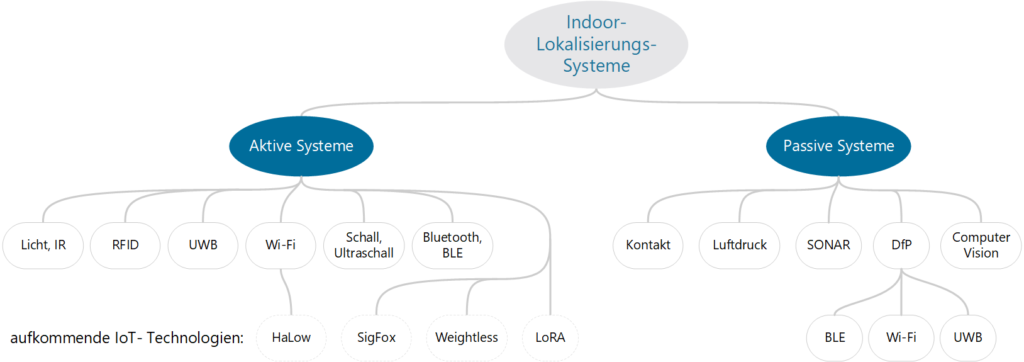
Die Abkürzungen werden im weiteren Text erläutert.
Aktive Lokalisierung
Mit aktiver Lokalisierung ist die aktive Teilnahme des Objekts oder der Person am Lokalisierungsprozess gemeint [1], insbesondere, wenn nur dann lokalisiert werden kann, solange ein elektronisches Gerät an der Person oder dem Objekt Signale versendet. Aktive IPS eignen sich daher auch besonders, wenn der Standort unregelmäßig bestimmt werden soll.
Details zu aktiven IPS
Wird die Position im mobilen Gerät an der Person oder Maschine berechnet, wird dies als geräteseitige Lokalisierung (Device Based Localization, DBL) bezeichnet [3]. Dies ist für allem für robotische Anwendungen und dezentrale Prozesse nützlich, wenn hohe Positions-Datenströme zur Infrastruktur vermieden werden sollen. Meist senden Ankerknoten Signale aus, die von den mobilen Geräten empfangen und ausgewertet werden. Dieser Ansatz reduziert die Komplexität der Ankerknoten zulasten eines höheren Aufwands auf Seite der mobilen Geräte. Das ist zum Beispiel vorteilhaft bei schwer zugänglicher Infrastruktur oder wenn keine Kabel verlegt werden sollen. Ein Systembeispiel ist die Navigation mit Smartphone, bei dem aus mehreren verschiedenen Lokalisierungstechnologien der Standort mittels Datenfusion bestimmt wird. Diese Synthetisierung der Standortbestimmung wird vereinzelt auch als hybride Lokalisierung [1] bezeichnet. Ein weiteres klassisches Beispiel, allerdings nur für die Lokalisierung außerhalb von Gebäuden, ist die Lokalisierung mit Globalen Navigationssatellitensystemen (GNSS), wie Galileo.
Im umgekehrten Fall senden die mobilen Geräte Signale, welche von fixen Ankerknoten empfangen und ausgewertet werden. Dies wird als monitorbasierte Lokalisierung (Monitor Based Localization, MBL) bezeichnet [3]. Hier verbrauchen die mobilen Geräte minimale Energie; der Installations und Auswertungsaufwand ist zur Infrastruktur hin verlagert. Werden so gewonnene Informationen von den mobilen Geräten benötigt, müssen sie erst über einen Datenkanal übertragen werden. Typische Anwendungsszenarien für MBL-Systeme sind Warenträgerverfolgung, Prozessanalysen und zentral koordinierte Roboterschwärme.
Beispiele für aktive IPS-Technologien sind:
- Ultraschall, schalllaufzeitbasierte Lokalisierung wie z.B. das Telocate Wave,
- UWB (ultra-wideband): Ultrabreitband bezeichnet pulspositionsmodulierte Funksignale im ISM-Band, die hohe verwendete Bandbreite relativ genaue Lokalisierung ermöglichen. UWB wurde im letzten Jahrzehnt etabliert,
- Bluetooth ist definiert im Standard IEEE 802.15.1 und stellt vor allem durch die AoA-Erweiterung letztes Jahr zu Bluetooth 5.1 ein sehr kostengünstiges und energiesparendes IPS dar,
- Wi-Fi findet als Technologie-Familie Verwendung in zahlreichen IPS, für IoT wurde die energiesparsame Variante HaLow im Standard IEEE 802.11ah eingeführt; im Moment wird der Standard IEEE 802.11az vorbereitet, der eine nativer Lokalisierung enthält (voraussichtlich im Jahr 2021 verfügbar),
- Intertialsensoren, auch IMU (inertial measurement unit) sind meist eine Kombination aus Beschleunigungs-, Drehraten und Magnetfeldsensoren. Sie diese dienen z.B. als Zusatz-Sensor für ein Hybrid-IPS, um die Kurzzeit-Präzision zu steigern,
- RFID (radio-frequency identification), der Klassiker aus den 80er Jahren: Kostengünstige mobile Tags, die mit teuren Lesegeräten über kurze Distanz mittels Funk ausgelesen werden,
- SigFox, Weightless und LoRA sind weiter funkbasierte Lokalisierungstechnologien, welche vor allem für IoT-Anwendungen geeignet sind,
- usw.
Passive Lokalisierung
Bei passiver Lokalisierung wird im Grunde kein Gerät an den zu ortenden Personen oder Objekten benötigt. Passive IPS messen Veränderungen in der Umgebung und ziehen daraus Rückschlüsse auf die Anwesenheit und Position. Identifikation kann über Mustererkennungsalgorithmen und Fingerprinting erreicht werden. Typische Beispiele sind pyroelektrische Bewegungsmelder, Lichtschranken und Kameras.
Passive IPS haben den großen Vorteil, dass Personen oder Objekte keine zusätzlichen Geräte mit sich führen müssen, um detektierbar zu sein. Umgekehrt ermöglichen diese auch die Lokalisierung von Personen oder Objekten, welche eventuell nicht vorgesehen waren. Bei passiven IPS, welche auf Hörschall- oder Videoaufzeichnungen beruhen, sind persönlichkeitsrechtliche Anforderungen oft ein Ausschlusskriterium. Bei funkbasierten Systemen, welche in gewisser Weise moderne Varianten der klassischen RADAR-Technologie sind, führen komplexe Raumaufteilungen und Abschattungen oft zu eingeschränkter Funktionalität.
Beispiele für passive IPS-Technologien sind:
- Ultraschall-SONAR, unhörbare kurze Signalpulse werden von Personen und Objekten in Reichweite reflektiert. Das System berechnet aus der reflektierten Signalstärke und Empfangszeitpunkten die Veränderungen im Raum,
- DfP-IPS (Device-free Passive) umfasst die modernen Varianten von RADAR: Funksignale verschiedener Technologien, z.B. Bluetooth Low-Energy (BLE), UWB und Wi-Fi, werden auf Veränderungen durch Objekte und Personen im Raum analysiert,
- Computer Vision umfasst die automatisierte Auswertung von Videoaufnahmen, welche im letzten Jahrzehnt durch zunehmend verfügbare Neurale Netzwerk–Chips stark an Leistungsfähigkeit zugenommen hat,
- Kontaktsensoren – einfachen Schalter bis zur kapazitiven Näherungssensorik – welche auf die Anwesenheit von Personen und Objekten Rückschlüsse geben.
- usw.
Quellenhinweise
[1] G. Deak, K. Curran, J. Condell. A survey of active and passive indoor localisation systems, Computer Communications, Volume 35, Issue 16, 2012.
doi: 10.1016/j.comcom.2012.06.004
[2] F. Höflinger, Lokalisierungssysteme für die Positionsbestimmung von Personen und Objekten im Innenraum, Dissertation, Universität Freiburg, 2013.
[3] F. Zafari, A. Gkelias and K. K. Leung. A Survey of Indoor Localization Systems and Technologies, IEEE Communications Surveys & Tutorials, vol. 21, no. 3, pp. 2568-2599, 2019.
doi: 10.1109/COMST.2019.2911558
[4] W. Ali, A. Kareem, & M. Jasim. Survey on Wireless Indoor Positioning Systems. Cihan University-Erbil Scientific Journal, 3(2), 42-47.
doi: 10.24086/cuesj.v3n2y2019.pp42-47
Verfasser
Dominik Jan Schott und Dr. Johannes Wendeberg
Telocate GmbH
info[a]telocate.de
https://www.telocate.de
Sachstand
Februar 2020
Im Herbst 2018 gingen die I.N.Fachbeiräte ‚Wissenschaft‘ und ‚Wirtschaft‘ davon aus, dass die aktive Lokalisierung etwas früher als die passive Lokalisierung Einzug in die Intralogistik halten dürfte, weil für die passive Lokalisierung weitergehender Forschungsbedarf gesehen wird.